
 Módulo integrado de potencia magnética
Buck (Step-Down)- baja tensión
Buck (Step-Down)- media tensión
Impulso (Step)
DC-DC Power Modules (en inglés)
Módulo integrado de potencia magnética
Buck (Step-Down)- baja tensión
Buck (Step-Down)- media tensión
Impulso (Step)
DC-DC Power Modules (en inglés)
 Módulo de potencia integrado magnéticamente (SiP)
Buck (Step-Down) — múltiples salidas
Buck (paso hacia abajo)
Impulso (Step)
Módulo de potencia integrado magnéticamente (SiP)
Buck (Step-Down) — múltiples salidas
Buck (paso hacia abajo)
Impulso (Step)
 Convertidores DC-DC personalizados
Convertidores DC-DC personalizados
Módulos de potencia a medida: soluciones de precisión para sus necesidades específicas.
Contáctenos hoy para discutir su proyecto!
Servomotor Encoders Incremental
Codificadores incrementales de 35mm
44mm codificadores incrementales
Codificadores incrementales de 48mm
Productos de Encoder
Servomotor codificador absoluto
Codificadores absolutos de 35mm
Codificadores absolutos de 44mm
Codificadores absolutos de 48mm
Codificador absoluto sin barba
Fabricación en la cual:

DC-DC Power Modules (en inglés)
Convertidores DC-DC personalizados Explore DC-DC ConvertersProductos de Encoder
Productos de sensores
Productos de Control de frecuencia
RZ35A09 servomotor Encoder absoluto
detalles
RZ35A08 Servo Motor Encoder absoluto
detalles
RZ35D06S servomotor Encoder absoluto
detalles
RZ4809A servomotor Encoders Absolute
detalles
RZH4409A servomotor Encoder absoluto
detalles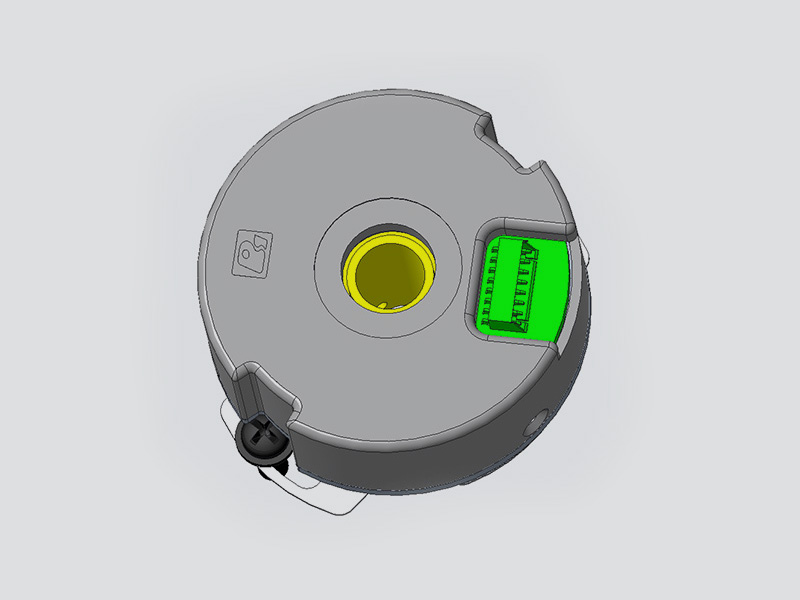
RZL4408A servomotor Encoder absoluto
detalles
RZL4409A servomotor codificador absoluto
detalles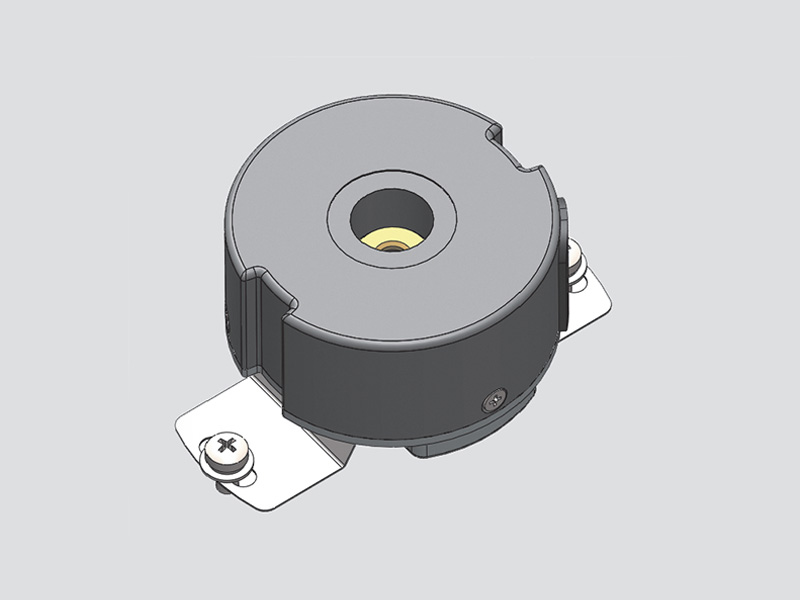
UZ3509 Servo Motor Encoder Incremental
detalles
UZ4409 Servo Motor Encoder Incremental
detalles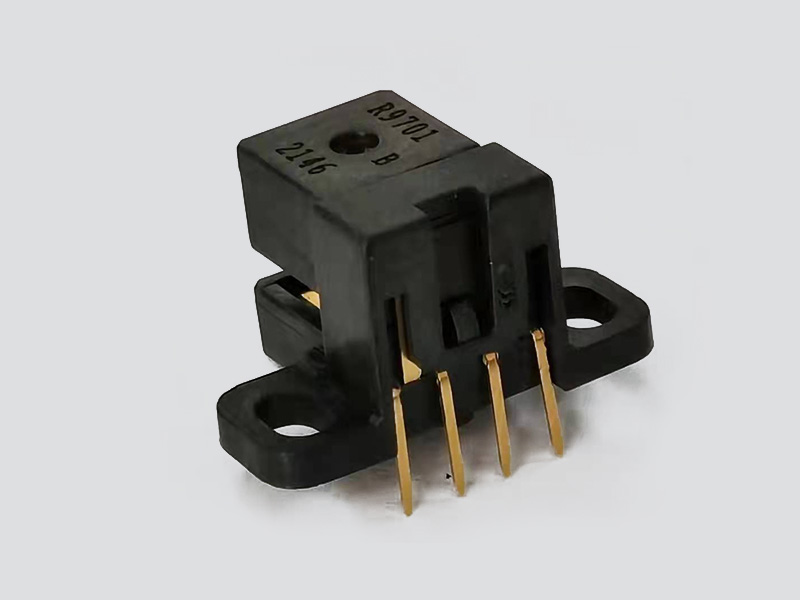
Módulos de codificación óptica RS970
detalles
RZ35 serie multi-giro con codificador absoluto
detalles
Serie RZ35 con la interfaz RS485 del codificador absoluto
detalles
RSU3506 codificador absoluto sin barba
detalles
RSG35 serie RSG35 codificación magnética absoluta sin soporte
detalles
TR8804 RTC Module (en inglés)
detallesTemperatura de trabajo | -20°C a +105°C |
Consumo consumo corriente | < 100 mA |
Tensión de la batería | Número del arancel aduanero común |
Tensión de falla de la batería | 2.5 V |
Tensión de advertencia de la batería | 3.1 V |
señal | Salida diferencial |
Tensión de alimentación | Suministro único de 5V |
Tiempo de ascenso/caída | Alrededor de 100 |
Resistencia índnoid | 50 M ² |
Rango de resolución | 131072 (17 bit) a 8388608 (23 bit) |
Contador de resolución de múltiples vueltas | 16 bits (65536 revoluciones) |
Precisión de posicionamiento absoluta | < - 50 segundos angulares Nota: la precisión específica depende del ajuste del motor y del montaje mecánico |
Precisión de posicionamiento por repetición | < − 3 segundos angulares Nota: la precisión específica depende del motor y mecánica montaje |
Aviso de fallo de tensión de la batería | si |
La interfaz | RS485 |
Frecuencia de comunicación | − 16 kHz |
Número de baubauje | 2.5 MHz |
Desviaciones de eje admisible | Axial: − 0,5 mm, Radial: − 0,02 mm, ángulo de inmersión: 0,1 ±, Axial: < 0,1 mm, caudal Radial: < 0,01 mm |
Velocidades de funcionamiento | Hasta 6000 RPM |
Diámetro del eje | Eje de un cono 1:10 |
Momento de inercia | 0,68 kg·mm² |
Aceleración Angular del Rotor | Durante la fuente de alimentación: − 80000 rad/s²; Cuando funciona con batería: − 4000 rad/s ≤ |
Choque choque mecánico | Aceleración del impacto: 980 m/s² para 11 ms; Impacto probado 3 veces en cada dirección, totalizando 18 impactos |
Resistencia a las vibraciones | Amplitud de hasta 1,5 mm (10-55 Hz); Aceleración de hasta 98 m/s² (55-2000 Hz); XYZ probado durante 2 horas por eje, totalizando 6 horas |
Rango de temperatura de trabajo | -20°C a +105°C |
Humedad relativa | − 90% (40 ≤ C/21 días, basado en EN60068-2-78), sin condensación |
Grado de protección | IP40 |

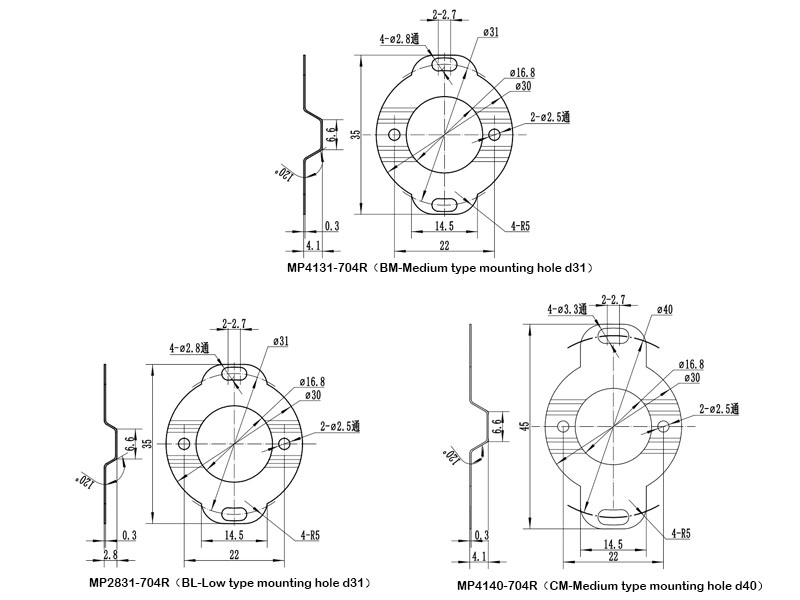
(nota: la pestaña muelle debe seleccionarse de acuerdo con el tamaño del motor.)

MP4131-704R(BM-Medium tipo Agujero de montaje
")
MP2831-704R(BL-Low tipo Agujero de montaje

MP4140-704R(CM-Medium tipo Agujero de montaje D40)
| Color de plomo | rojo | negro | Azul azul | amarillo | marrón | blanco | NC | Escudo escudo |
| Fabricación de plaqu | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| señal | 5V | PNB | 485+ | 485− | Batería + | GND por batería | NC | Escudo escudo |
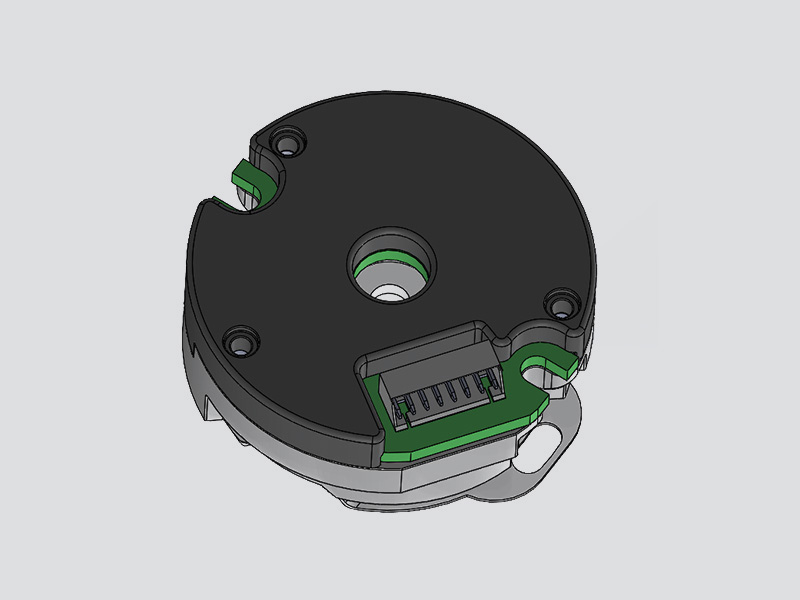
RZ35D06Q codificador absoluto Se utiliza principalmente para sistemas de control servoaccionados. Proporciona información de retroalimentación y señales auxiliares requeridas por la posición precisa y las unidades de control de velocidad.
")
Nota: el eje recto de 8mm y el eje cónico de 9mm solo están disponibles para el RZ35A.

| El artículo | descripción | Cuadro 1 | Las cajas/ cartón | G.W | N.W | QTY/ cartón | Tamaño del paquete |
| RZ35 | Codificador absoluto, 35mm de diámetro exterior | 10pcs | 10box | 0.38kgs | 0,3 KGS | 100ud. | 310*130*45mm |
Descubra todas las especificaciones técnicas descargando hoy mismo la hoja de datos.
| Número de pieza | La interfaz |
dimensiones
(mm) |
Rango de resolución | Resolución contador |
Comunicación comunicación frecuencia |
Temperatura de trabajo |
Comunicación comunicación frecuencia |
Velocidades de funcionamiento |
Protección protección estructura |
La huella 3D | Hoja de datos | muestra |
| RZ35A08 | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 |  |
 |
|
| RZ35A09 | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35D06Q | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35D06S | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZL4408A | RS485 | Φ44mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZH4409A | RS485 | Φ44mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZL4409A | RS485 | Φ44mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ4809A | RS485 | Φ48mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| UZ3509 | RS485 | Φ35mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| UZ4408 | RS485 | Φ44mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| UZ4409 | RS485 | Φ44mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| UZ4809 | RS485 | Φ48mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| RS972 | / | / | / | / | / | -40°C to +85°C | / | / | / | |
|
|
| RS970 | / | / | / | / | / | -40°C to +85°C | / | / | / | |
|
|
| RK Series | / | / | / | / | / | -20°C to +85°C | / | / | / | |
|
|
| RK Series | / | / | / | / | / | -20°C to +85°C | / | / | / | |
|
|
| RK Series | / | / | / | / | / | -20°C to +85°C | / | / | / | |
|
|
| RF28 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RT28 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RF20 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RR28 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RS5 | / | / | / | Single/Multi-Turn | / | / | / | / | / | |
|
|
| RSG35 | RS485 | / | 17-23 Bits | Single/Multi-Turn | ≤16K | -20 ℃ ~+105 ℃ | 16K | 6000rpm | IP40 | |
|
|
| RSU3506 | RS485 | / | 17-24 Bits | Single/Multi-Turn | ≤16K | -20 ℃ ~+105 ℃ | 16K | 6000rpm | IP40 | |
|
|
| MS Series | / | / | 17 Bits | Single/Multi-Turn | ≤16K | -10℃~105℃ | 16K | ≤6000rpm | / | |
|
|
| RZ44 & RZ48 | RS485 | / | 17-23 Bits | Single/Multi-Turn | ≤16K | -20 ℃ ~+105 ℃ | 16K | 6000rpm | IP40 | |
|
|
| RZ1337A | RS485 | / | 25 Bits | Single/Multi-Turn | ≤16K | -20°C-+105°C | 16K | 12000rpm | IP40 | |
|
|
| RZ7810 | RS485 | / | 23~25 Bits | Single/Multi-Turn | ≤16K | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RS Series | RS485 | / | 17~23 Bits | Single/Multi-Turn | ≤16K | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35 Series | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35 Series | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|

Esencial para la precisión y fiabilidad de los equipos médicos

Mejorar la automatización y eficiencia en diversas aplicaciones de robótica

Mejorar la eficiencia y confiabilidad de los sistemas de automatización
Información precisa sobre la posición y la velocidad